陕西省建设执业资格注册管理中心网站如何制作网页链接教程
1.创建一个IOS单页应用

2.双击Main.storyboard然后拖放UITableView到视图中

3.添加TableViewCell
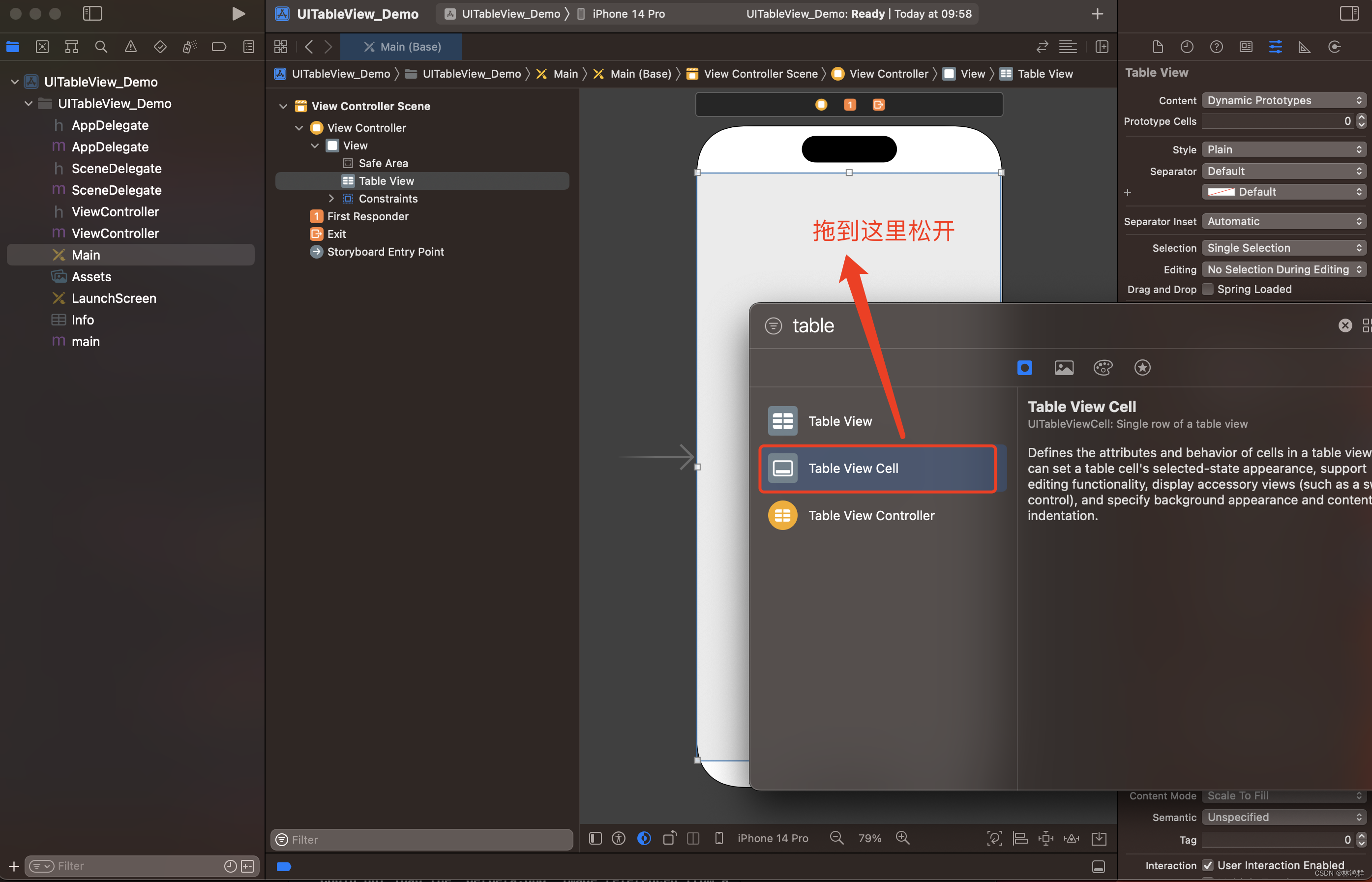
成功添加Table View Cell

4.修改Table View Cell属性
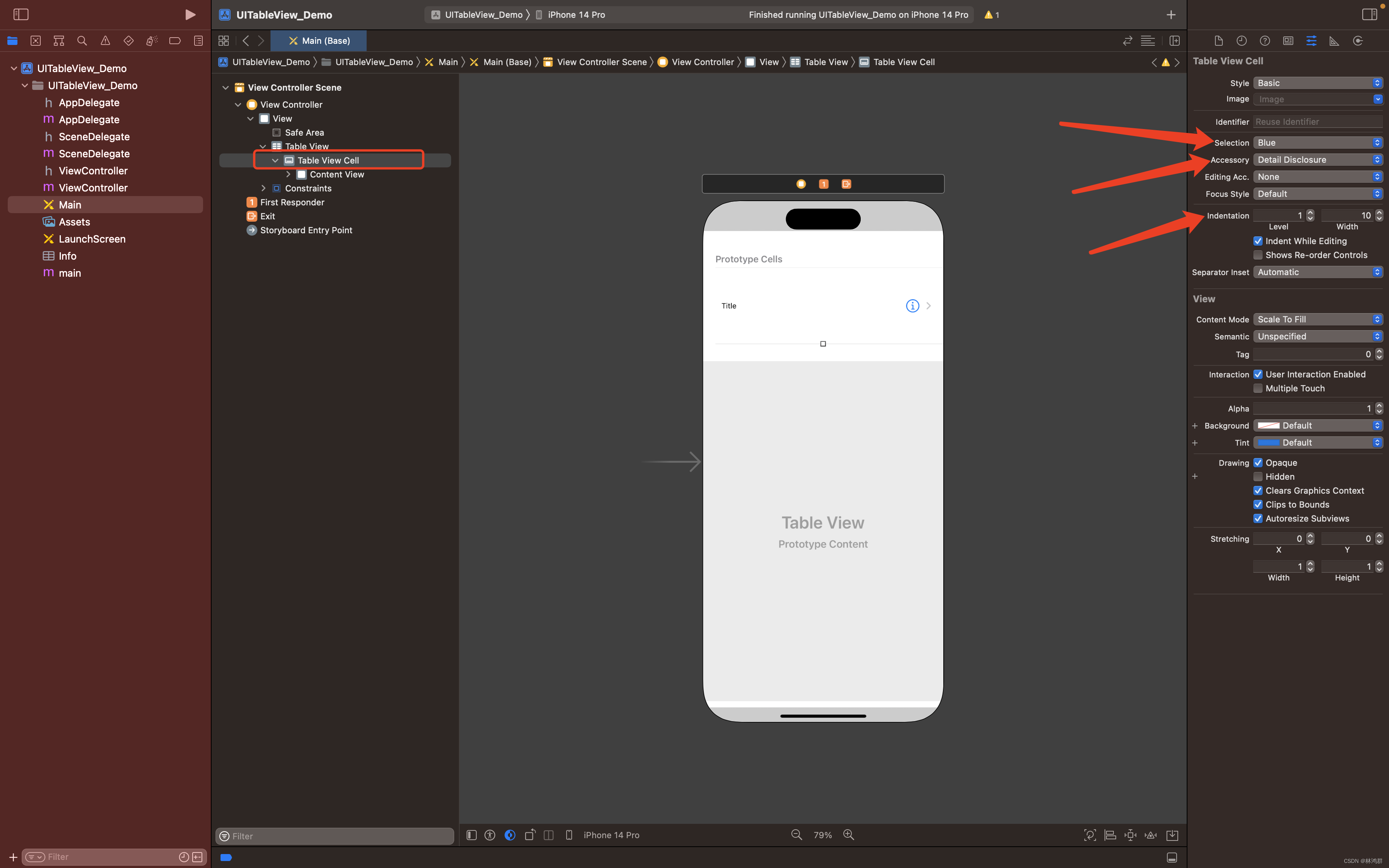 选中Table View Cell 在右边的Image栏输入default.png回车
选中Table View Cell 在右边的Image栏输入default.png回车
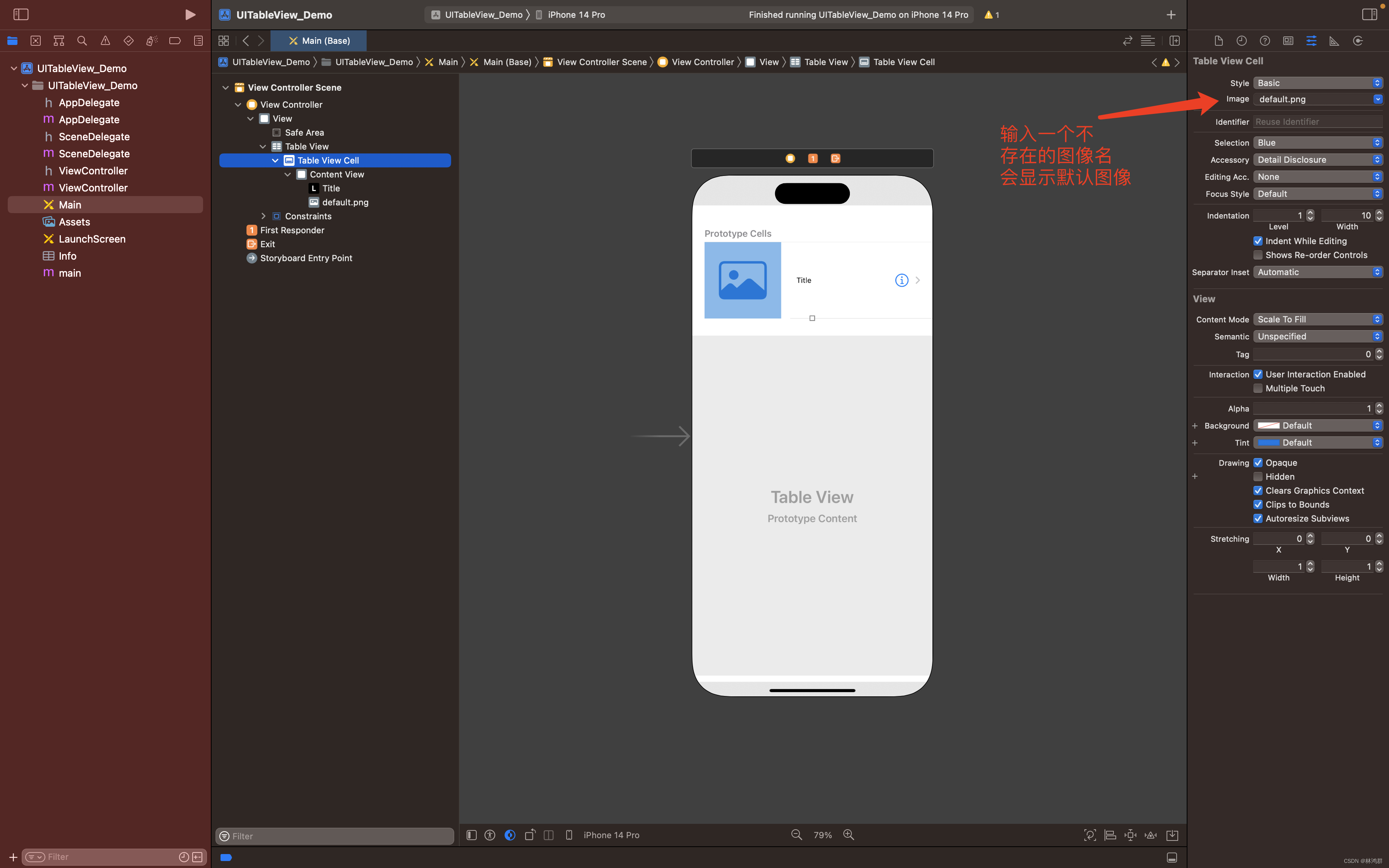
到此布局设计完成,现在运行还是显示 空白,要在代码中做相关的实现才能正常显示
5.在视图控制中继承并实现接口
1.创建一个IOS单页应用
2.双击Main.storyboard然后拖放UITableView到视图中
3.添加TableViewCell
成功添加Table View Cell
4.修改Table View Cell属性
选中Table View Cell 在右边的Image栏输入default.png回车
到此布局设计完成,现在运行还是显示 空白,要在代码中做相关的实现才能正常显示
5.在视图控制中继承并实现接口