杭州网站制作专业杭州百度首页排名
多个音频怎么合并?无论是制作连贯的播客节目还是将音乐片段整合成专辑,音频合并已成为许多创作者的常见需求。通过有效合并音频,可以显著提升项目的整体质量,确保内容的连续性和一致性。然而,合并后的文件通常比原始单个文件大,可能导致存储空间的增加。
合并过程中可能需要调整每个片段的音量、节奏等参数,以实现无缝连接,这会增加处理复杂性。此外,合并后的音频文件编辑和修改变得更为困难,修复错误或重新调整可能需要重新合并。尽管如此,音频合并可以创建流畅的听觉体验,减少文件数量,简化管理和分享,并提高内容的一致性和专业感,同时减少冗余,优化存储空间,便于后续的编辑和调整。
第一种多个音频怎么合并的方法:使用“星优音频助手”软件
软件下载地址:https://www.xingyousoft.com/softcenter/XYAudio
第1步,等你快速的在自己的电脑上面下载安装好【星优音频助手】软件之后,你就需要将其打开来,并且在界面点击【音频合并】功能。

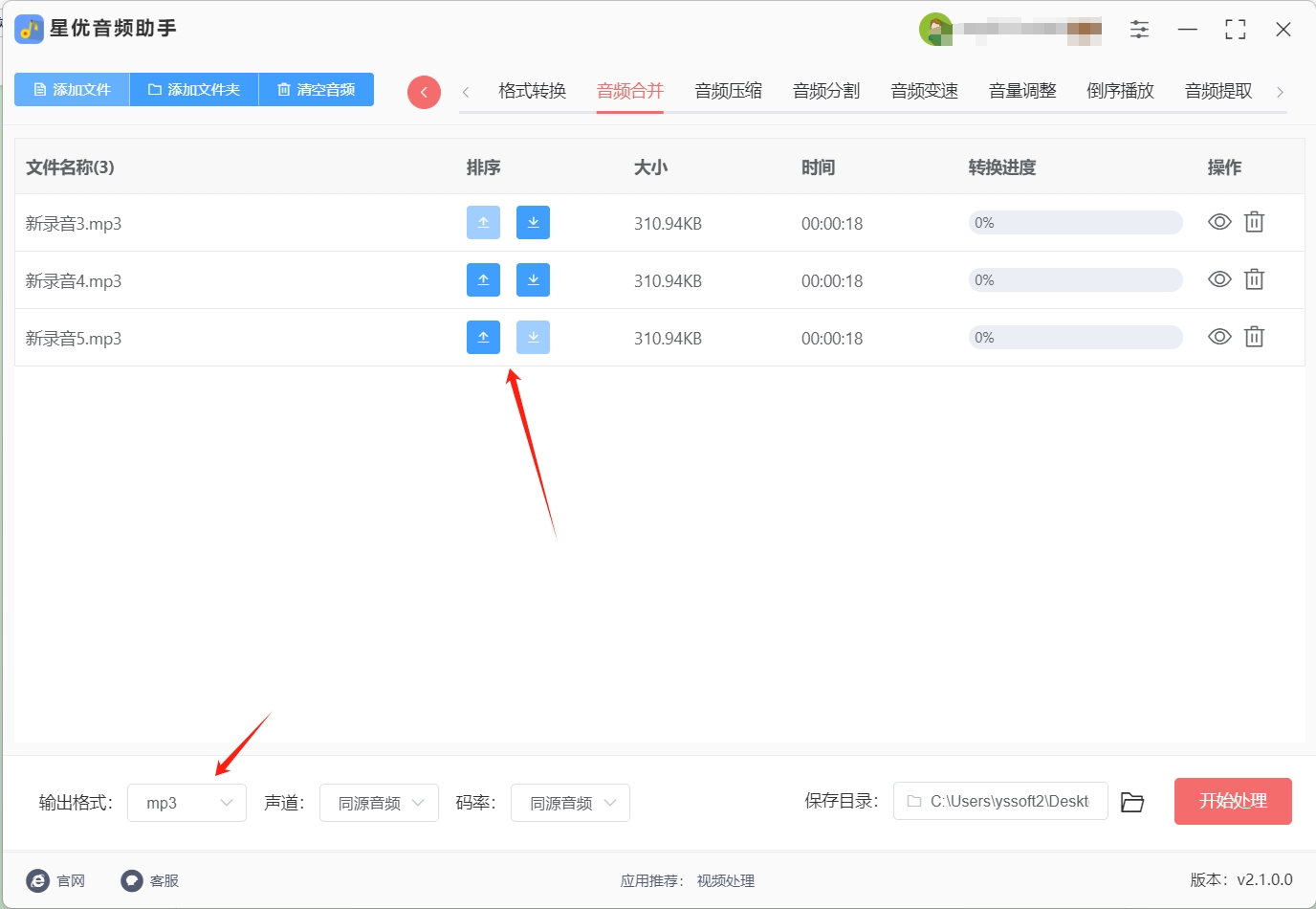
第2步,接着,你在点击【添加文件】按钮,将你要合并的音频文件加载到软件中。这边是支持你批量的进行转换操作的,且通过批量转换的操作来节省出更多的时间。

第3步,导入文件后,利用文件名旁边的蓝色箭头调整音频的顺序。软件将按照你设置的顺序进行合并。此外,你还可以在界面底部设置下“格式”、“声道”和“码率”。这边的“格式”是可以按照自己的需求来将“MP3”设置成转换之后的格式。
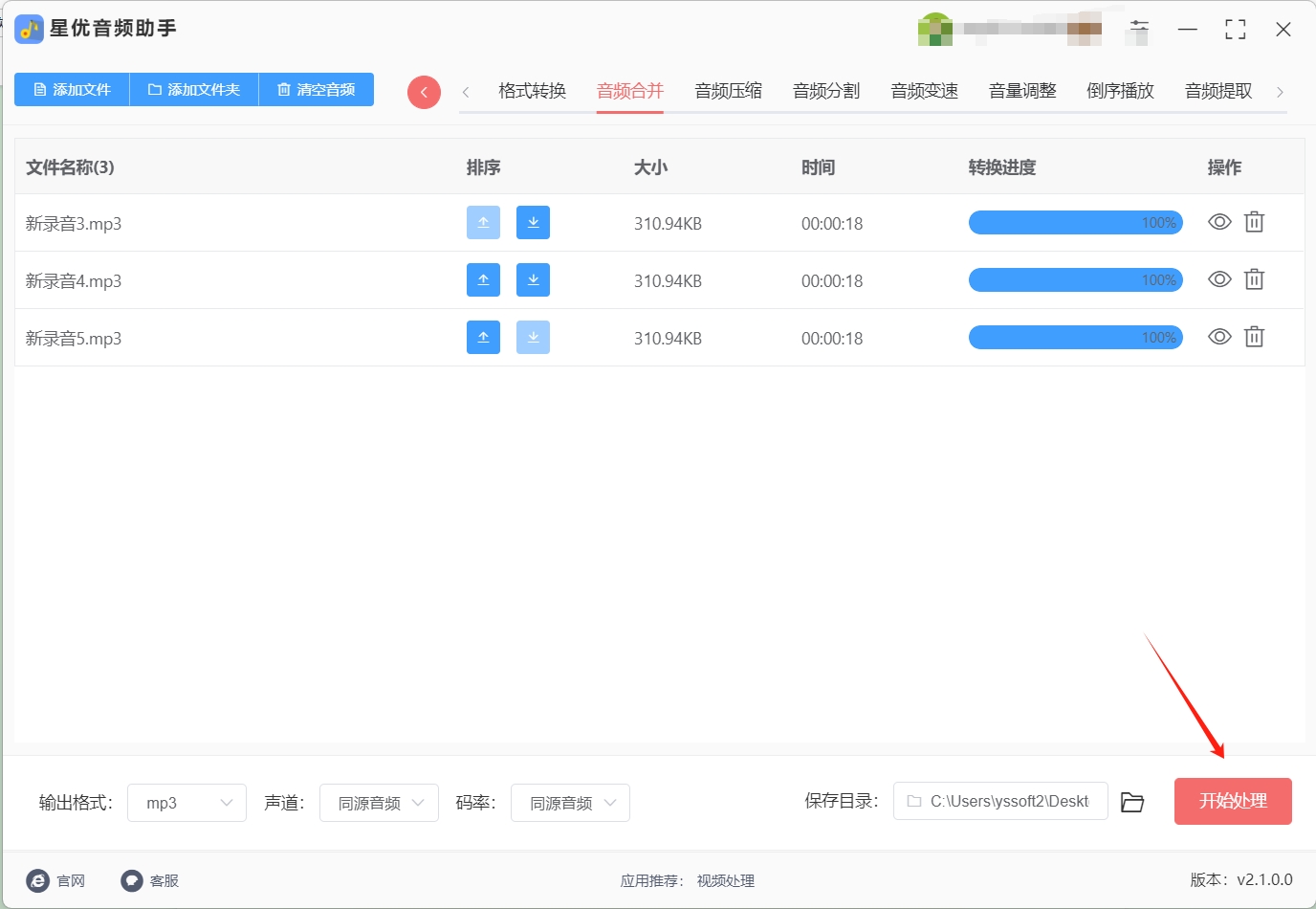
第4步,点击软件右下角的“开始处理”按钮开始合并音频。合并过程完成后,软件会自动打开保存合并文件的文件夹,你可以在这里找到合并后的音频文件。
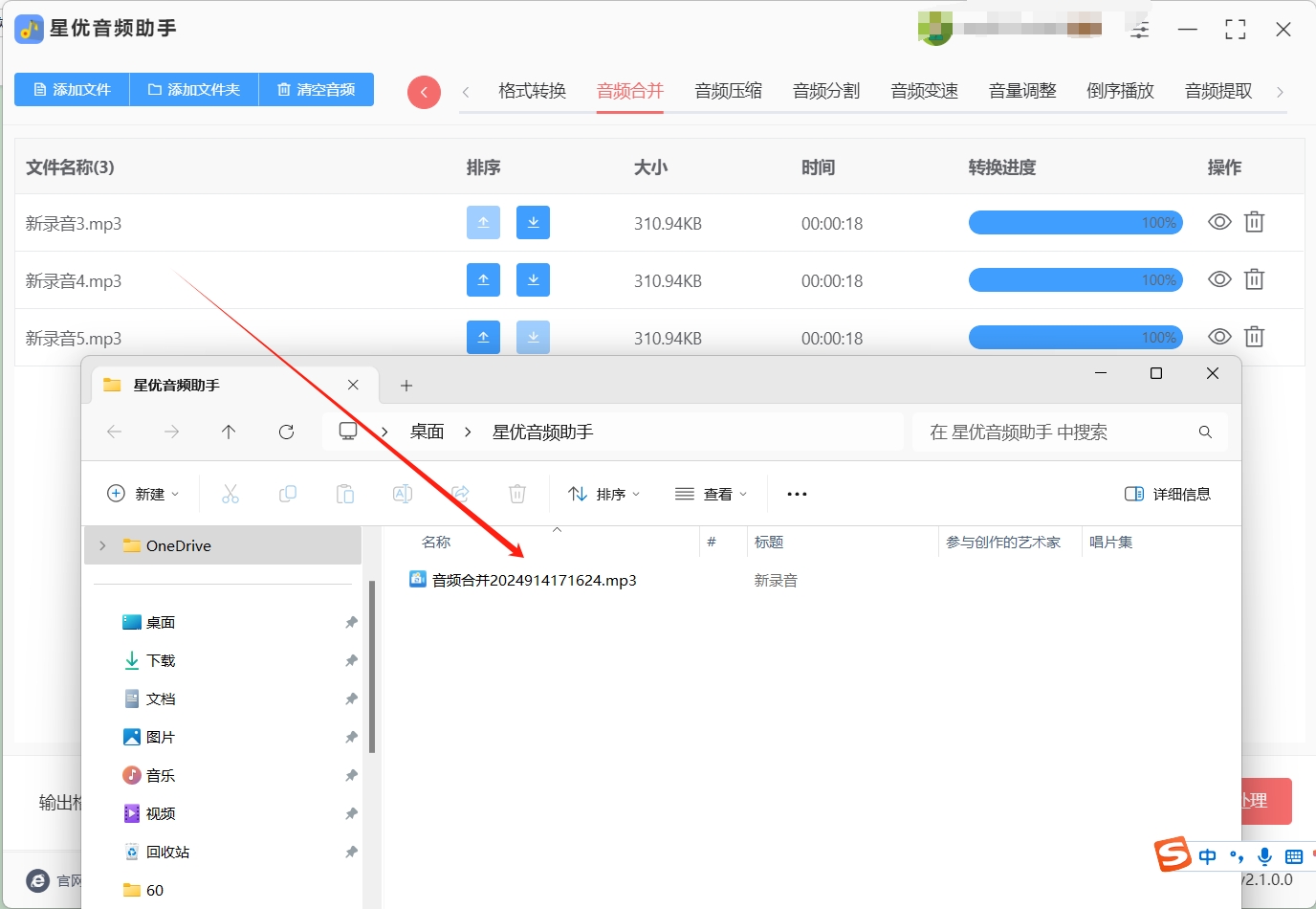
第5步,如图所示,你可以在打开来的输出文件夹当中,看到被选中的几个mp3音频文件已经成功的合并为一个文件。
第二种多个音频怎么合并的方法:使用“彩虹音频处理器”软件
打开彩虹音频处理器软件:
启动彩虹音频处理器软件,确保你已经安装了最新版本的应用程序。如果尚未安装,可以从官方网站下载并安装。
导入第一个音频文件:
将第一个音频文件从文件夹拖入软件的主界面。你也可以使用软件中的“导入”按钮浏览并选择音频文件。文件将自动显示在时间轴上。
进行剪辑截取(可选):
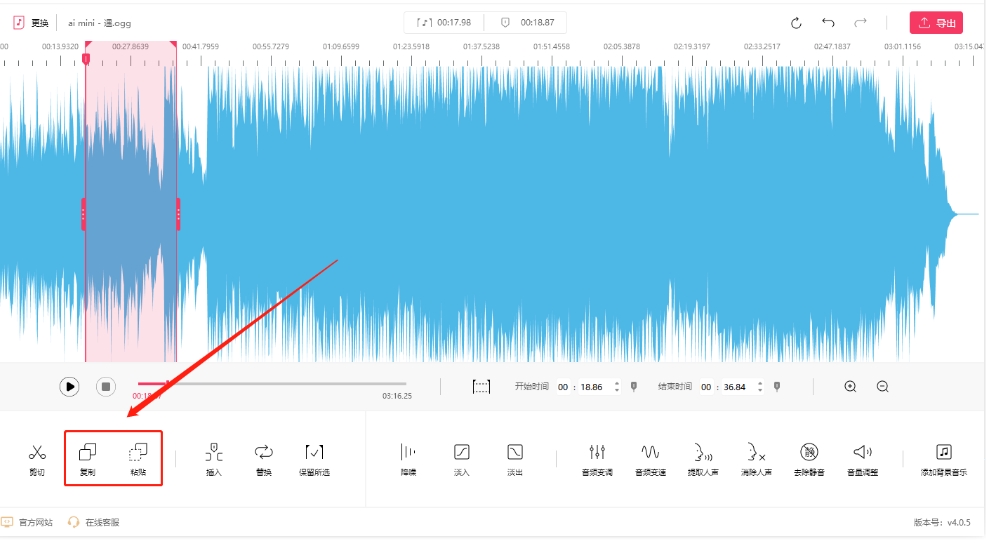
如果需要对音频进行剪辑,可以使用剪刀工具或选择所需的音频段,然后点击“剪切”或“删除”按钮来移除不需要的部分。这一步可以帮助你精确控制合并的内容。
拖动时间轴选中合并位置:
使用鼠标拖动时间轴上的音频,选择要插入新音频的位置。确保时间轴上的光标停留在正确的点,以便新音频能够正确插入。
插入第二个音频文件:
将第二个音频文件拖入时间轴中,放置在第一个音频之后。你可以继续按照相同的方法添加更多音频文件,依次排列在时间轴上。
调整音频顺序和位置:
通过拖动音频文件来调整它们在时间轴上的位置。确保各个音频片段按正确的顺序排列,并没有遗漏或重叠。
应用淡入淡出效果(如需):
如果你想要在音频的开头或结尾添加渐变效果,可以选择音频片段,使用软件中的“淡入”或“淡出”工具进行设置。这可以使音频切换更加自然和流畅。
播放试听:
点击“播放”按钮试听合并后的音频,检查音频之间的过渡效果和整体质量。确保所有片段合并无误,并且没有音量突变或其他问题。
导出音频:
当你对合并效果感到满意时,点击“导出”按钮。选择所需的音频格式(如 MP3、WAV 等)和音频质量设置,确保符合你的需求。
完成导出:
确认导出设置后,点击“确定”或“导出”完成操作。选择保存位置并命名文件,然后等待软件处理并保存合并后的音频文件。
第三种多个音频怎么合并的方法:使用“BDUIF”软件
下载并安装BDUIF软件:
从BDUIF官网或可信任的软件下载平台获取软件安装包。双击安装包,按照提示完成安装。安装完成后,启动BDUIF软件。
创建新项目:
打开软件后,选择“新建项目”选项。输入项目名称并选择保存位置,然后点击“创建”以启动一个新的音频编辑项目。
导入音频文件:
将音频文件从计算机拖放到BDUIF的时间轴或排列视图中。如果你不想拖放,也可以使用软件中的“导入”按钮选择文件进行添加。音频文件将显示在时间轴上,并按照导入的顺序排列。
调整音频文件的顺序和位置:
通过拖动音频片段来调整它们在时间轴上的顺序和位置。你可以使用剪切工具对音频片段进行精确的剪辑,以去除不需要的部分或调整片段长度。
使用混音器调整音量、平衡和效果:
点击“混音器”选项卡,调整每个音频轨道的音量、平衡和其他音效设置。根据需要,你可以添加淡入淡出效果、均衡器调整等,以优化音频的整体表现。
导出合并后的音频文件:
当你完成所有调整后,点击“导出”按钮。选择你希望的音频格式(如 MP3、WAV 等)和质量设置。确认所有导出选项,并选择保存路径。
完成导出:
确定导出设置后,点击“导出”或“保存”按钮。BDUIF将处理并生成合并后的音频文件,保存到你选择的文件夹中。等待处理完成后,你可以在目标位置找到并使用合并后的音频文件。
第四种多个音频怎么合并的方法:使用“ Audacity”软件
打开Audacity软件并准备合并音频
首先,确保你的电脑上已经安装了Audacity这款开源且功能强大的音频编辑软件。双击桌面上的Audacity图标或从开始菜单中找到它并打开。
导入想要合并的音频文件
创建新项目:打开Audacity后,通常会看到一个空白的项目窗口。如果之前已经打开了其他项目,可以选择“文件”菜单中的“新建”来创建一个新的音频项目。
导入音频文件:接下来,点击菜单栏上的“文件”选项,然后选择“导入”->“音频...”。在弹出的文件选择对话框中,浏览并找到你想要合并的第一个音频文件,选中它并点击“打开”。Audacity会将这个文件加载到新的音轨上。
将第二个音频文件拖放到界面
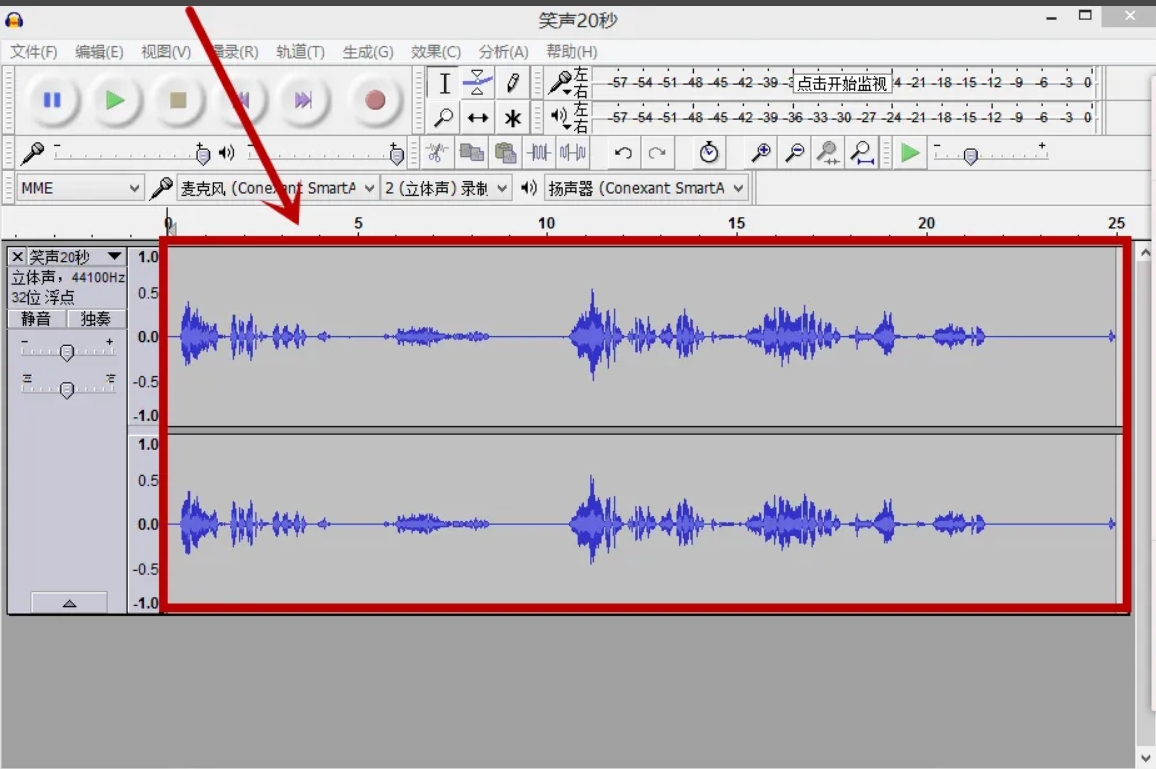
再次导入音频:重复上述导入步骤,但这次选择第二个你想要合并的音频文件。这次,Audacity会将第二个音频文件加载到另一个新的音轨上,通常紧挨着第一个音频文件的音轨下方。
拖放音频文件:如果你希望两个音频文件在视觉上更容易对齐,可以通过拖动第二个音频文件的音轨标题栏(通常是音轨最左侧的部分)来移动它,直到它位于第一个音频文件的下方且位置合适。
调整音频文件的起始时间
精确对齐:为了使两个音频文件在播放时无缝衔接,你需要确保它们的起始时间是对齐的。这通常意味着第二个音频文件的开始应该紧接着第一个音频文件的结束。你可以通过拖动第二个音频文件音轨上的波形,或者使用Audacity提供的时间选择工具来精确调整起始位置。
预览检查:在调整完毕后,不妨播放一下音频,确保两个音频片段之间的过渡是平滑且自然的。
可选:进行音量调整、淡入淡出等编辑
音量调整:如果你发现两个音频文件的音量差异较大,可以在Audacity的“效果”菜单中找到“音量与振幅”选项,使用其中的“标准化”或“放大”功能来调整音量,使它们听起来更加和谐。
淡入淡出:为了增强音频的过渡效果,可以给音频的开头或结尾添加淡入淡出效果。在Audacity中,这可以通过选择音频片段,然后前往“效果”->“淡入/淡出”来实现。
导出合并后的音频文件
准备导出:在确认所有编辑都已完成后,就可以准备导出合并后的音频文件了。首先,你可能想要保存你的Audacity项目,以便将来需要时可以重新打开和修改。
选择导出格式:点击菜单栏上的“文件”->“导出”->“导出为音频文件...”。在弹出的对话框中,你可以选择多种音频格式,如MP3、WAV等,具体取决于你的需求和目标播放设备。
设置保存位置和名称:指定一个保存位置,并给你的音频文件起一个合适的名字。确保文件名和保存位置易于记忆和查找。
完成导出:点击“保存”按钮,Audacity将开始导出音频文件。根据文件的大小和你的系统性能,这个过程可能需要几秒钟到几分钟不等。导出完成后,你就可以在指定的位置找到并播放你的合并音频文件了。
第五种多个音频怎么合并的方法:使用“ MP3 Joiner ”软件
MP3 Joiner 是一个专门用于合并 MP3 文件的工具。
步骤:
下载并安装 MP3 Joiner:从官方网站下载并安装软件。
打开软件:启动 MP3 Joiner。
添加 MP3 文件:点击“添加”按钮,选择需要合并的 MP3 文件。
排列文件顺序:调整文件顺序。
合并并保存:点击“合并”按钮,然后保存合并后的文件。
第六种多个音频怎么合并的方法:使用“优速音频处理器”软件
下载并安装优速音频处理器软件:
访问优速音频处理器的官方网站或信赖的软件下载平台,下载最新版本的安装包。
双击下载的安装包,按照屏幕上的指示完成软件的安装过程。安装过程中,选择适合的安装路径并确认安装设置。
安装完成后,启动优速音频处理器软件,准备开始音频合并操作。
打开软件,选择音频合并功能:
启动软件后,你会看到主界面上有多个功能选项。找到并点击“音频合并”功能按钮。这通常在软件的主界面上或在“工具”菜单中。
进入音频合并功能后,软件将显示相关的操作界面,用于处理音频文件的合并。
添加想要合并的音频文件:
点击“添加文件”或“导入音频”按钮,浏览你的计算机,选择需要合并的音频文件。你可以一次性选择多个文件,也可以逐个添加。
选中的音频文件会显示在合并列表中,按你选择的顺序排列。你可以通过拖放的方式调整文件的顺序,以确保它们按照正确的顺序合并。
调整播放顺序:
如果添加的音频文件顺序不符合你的需求,可以使用列表中的“上移”或“下移”按钮调整文件的顺序。
确保音频文件按正确的顺序排列,以便合并后的结果符合你的预期。
设置输出音频格式和参数(可选):
点击“输出设置”或“格式设置”按钮,选择你希望的输出音频格式,如 MP3、WAV、AAC 等。
根据需要,调整音频的质量参数,包括比特率、采样率等。较高的比特率通常提供更好的音质,但会增加文件大小。
确认设置并应用,以确保输出音频符合你的需求。
点击开始转换:
完成设置后,点击“开始转换”或“合并”按钮。软件将开始处理和合并选中的音频文件。
等待合并过程完成。根据音频文件的数量和大小,处理时间可能会有所不同。
等待合并完成:
在合并过程中,你可以查看进度条以了解处理的进度。完成后,软件通常会弹出提示或显示合并成功的消息。
点击“打开文件夹”或“查看文件”按钮,前往保存合并后的音频文件的位置。检查合并结果,确保所有文件正确合并,音质符合预期。
第七种多个音频怎么合并的方法:使用“ iMovie”软件
iMovie 是 Mac 上的一个视频编辑工具,也支持音频处理。
步骤:
打开 iMovie:启动 iMovie 应用。
创建新项目:选择“创建新项目”,选择“电影”。
导入音频文件:拖拽音频文件到项目中。
调整音频位置:在时间轴中按顺序排列音频文件。
导出项目:点击“文件”>“共享”>“导出文件”,选择音频格式保存。
第八种多个音频怎么合并的方法:使用FFmpeg
FFmpeg 是一个强大的命令行工具,用于音频和视频处理。
步骤:
安装 FFmpeg:下载并安装 FFmpeg(参考 FFmpeg 官网)。
打开命令行工具:在计算机上打开终端(Mac/Linux)或命令提示符(Windows)。
合并音频:使用以下命令:
sh
ffmpeg -i "concat:file1.mp3|file2.mp3" -acodec copy output.mp3
将 file1.mp3 和 file2.mp3 替换为你的音频文件名称。
查看结果:检查 output.mp3 文件,确认合并结果。
通过以上步骤,你已经成功地将多个音频文件合并为一个。这种合并不仅方便了管理和播放,还可以提升项目的整体专业感。无论你是在制作播客、音乐集,还是编辑视频素材,合并音频能确保文件的连续性和完整性,避免了重复播放和切换带来的不便。在操作完成后,建议仔细检查合并后的文件,以确认所有音频段都按预期顺序排列且音质无损。这样,你将能够高效地完成音频处理任务,获得一个整洁且高质量的最终文件。